机械臂轨迹规划之笛卡尔空间直线规划matlab仿真程序 在机械臂作业过程中,我们常希望末端执行器在空间中距离较远的两点间作直线运动,而对应的轨迹规划方法称为直线规划。 首先考虑对位置的插补。当起始点与目标点的...
”机械臂 机器人 matlab 轨迹规划 直线规划“ 的搜索结果
matlab机器人工具箱实现机械臂直线轨迹&圆弧轨迹规划(带sw模型+matlab程序+报告)
我的大三的机器人控制原理课程设计及,利用机器人工具箱,进行六自由度的机械臂的直线轨迹规划和圆弧轨迹规划,完全可用,参数可改,有注释说明
Matlab毕业设计—四自由度机械臂的轨迹规划研究,已获高分通过项目。 Matlab毕业设计—四自由度机械臂的轨迹规划研究要实现的功能是通过上位机实现轨迹规划功能。 系统环境为Windows 10 软件环境为Matlab、Qt5。 ...
来源于课程设计,利用机器人工具箱10.4实现了关节角度空间轨迹生成和规划和笛卡尔空间圆弧轨迹和直线轨迹的生成规划。每种都提供了四种规划方式包含:匀速运动,带抛物线过渡段的轨迹规划,三次多项式轨迹规划,五次...
课程设计,利用工具箱实现了机械臂的直线,圆弧,五次多项式规划,内部封装,底耦合,机械臂模型默认三自由度,模块化,易于更改,注释完全,圆弧规划提供了抛物线过渡段轨迹优化
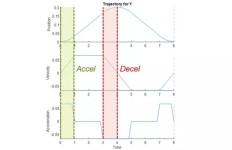
当机械臂需要采用直线轨迹的时候,三次多项式并不能满足需求 若轨迹中有多条直线,会导致连接点的速度不连续 解决方法:将直线段两端修正为二次方程式 规划方式 中间段采用一次多项式 起始段和结束段采用二次...
【代码】3-5-3机械臂轨迹规划matlab仿真。
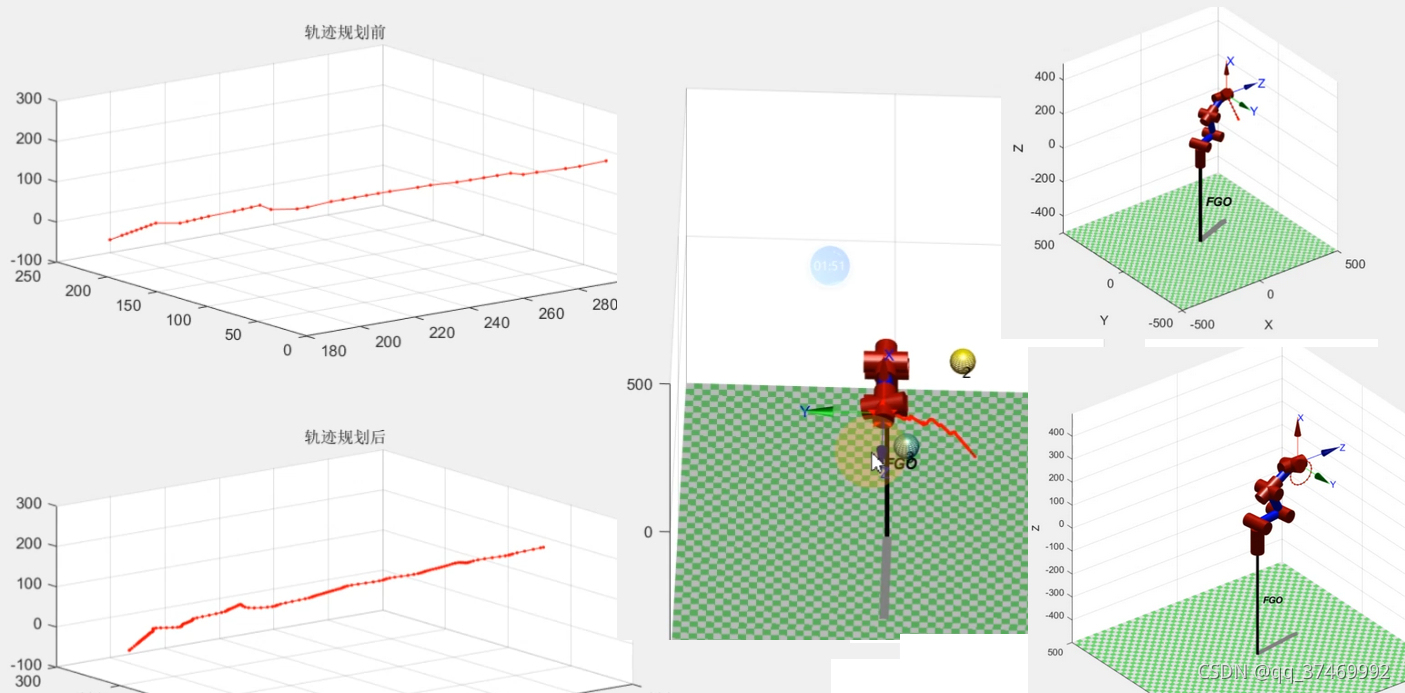
有人问我为什么之前规划的不是直线,所以我打算规划个直线。 2.matlab程序 clc; clear; %建立机器人模型 % theta d a alpha offset L1=Link([0 0.4 0.025 pi/2 0 ]); %定义连杆的D-H参数 L2=Link([p...



以直线 45 度的轨迹将玻璃杯从地面提升到桌面高度。 Build Robot 根据输入构建机器人,然后 Go!开始模拟。 说明: 可编辑的字段是: d_1 - 第一臂形成的初始三角形的底边 d_2 - 第二臂形成的初始三角形的底边 h - ...



为了能够实现机械臂的运动轨迹规划,同时更加深入学习机器人学相关理论知识,并将其运用在时间当中,我采用Robotic ToolBox建立四轴机器人模型并实现运动控制仿真,并作以记录分享。 四轴机械臂实物 Robotic ...
1.原理简述 直线插补时,指定起止坐标与速度。...2.matlab代码 clear; clc; p0=[1,2,3]; pf=[2,4,5]; %指定起止位置 v=0.1; %指定速度 x=[p0(1)];y=[p0(2)];z=[p0(3)]; L=((pf(1)-p0(1))^2+(pf(2)-p0(2)...
1. clear; clc; % 建立连杆系 L1=Link([0 12.4 0 pi/2 0 -pi/2 ]); L2=Link([0 0 0 -pi/2 ]); L3=Link([0 15.43 0 pi/2 ]); L4=Link([0 0 0 -pi/2 0 0 ]); L5=Link([0 15.925 0 pi/2 ]);...L6=Link([0 0 0 -pi/2 ...

在Matlab中,可以使用Robotics System Toolbox来进行SCARA机械臂的轨迹规划。首先,需要创建一个机器人对象,并指定其DH参数(Denavit-Hartenberg参数)和关节限制。然后,可以使用不同的轨迹规划算法来生成机器人的...
本文详细介绍了利用MATLAB仿真UR5机器人的simulink simscape自制建模过程,并对其中的正向运动学、逆向运动学、关节空间轨迹规划、笛卡尔空间轨迹规划和直线插补进行了深入分析。接着,根据机器人的运动学模型,建立...
对于机械臂末端的姿态插补方法与直线规划中所述方法一致,因此,今天我们主要介绍圆弧规划中对于机械臂末端的位置插补。
三自由机器人正逆运动学分析+matlab代码+直线轨迹与圆轨迹
推荐文章
- Java基础 高频面试题,2024年最新java多并发面试题-程序员宅基地
- vue视频播放插件vue-video-player的具体使用方法-程序员宅基地
- Element-UI 项目中 Pagination 分页如何使用 ???_element ui中pagination分页怎么用-程序员宅基地
- unity3dButton组件详细用法_unity button怎么用-程序员宅基地
- 安全***需要掌握的东西-程序员宅基地
- linux gs pdf,linux – 什么是汇编中的%gs-程序员宅基地
- 模拟退火算法matlab代码实现-程序员宅基地
- jQuery 语法实例_jquery-syntax示例-程序员宅基地
- Anaconda 安装与TensorFlow安装_error: pytest-astropy 0.8.0 requires pytest-cov>=2-程序员宅基地
- Assembly基础知识-程序员宅基地